3D光学实验平台与三维检测软件系统
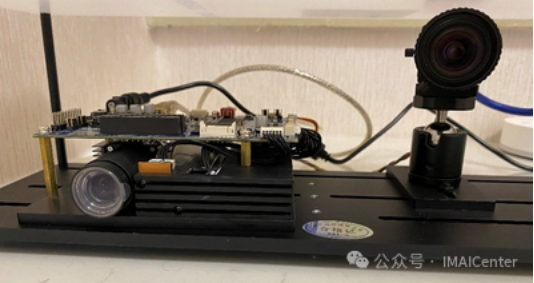
3D光学实验平台进行薄板装配过程形貌测量,集成了TIDLP LightCrafter4500EVM 结构光投影模块和工业相机的结构光3D扫描模块,可以构建三维点云数据,并采用三维检测软件系统对三维点云数据进行分析。实验平台主要包括以下几个部分:
①基座:由合金材料和亚克力板制成,主要实现图像采集模块和投影仪的安装固定;
②图像采集模块:图像采集模块包括工业相机和镜头两个部分,将采集到的包含深度信息的畸变编码图案通过传输接口输入到计算机内。
③投影仪:从视频接口接收需要投影的编码图案,并将其投影至被扫描物体表面。

设计并开发了算法工具层提供点云处理算法以适应不同对象、不同场景、不同检测目标的3D检测场景。
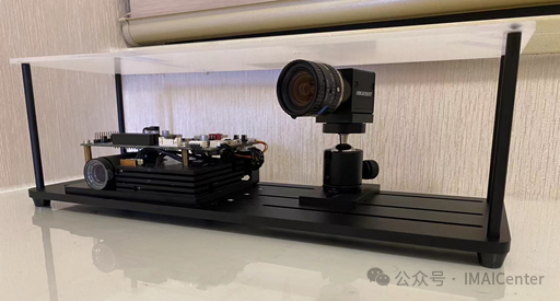
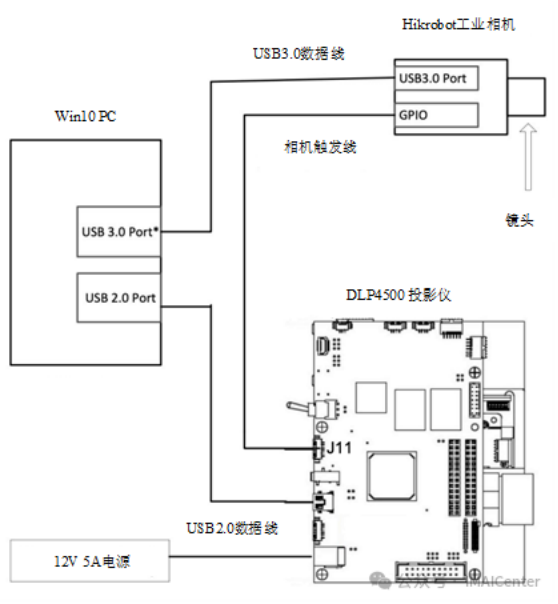
图4 基于机器视觉的3D测量硬件系统 软件系统:主要包含点云特征提取模块、点云处理模块、点云配准等模块。主要用于完成系统对三维点云的特征提取、处理、操作变换以实现对产品表面缺陷的识别与定位,针对不同检测对象的特征可以通过调用点云处理工具箱方便快捷地开发出对应的缺陷检测、尺寸测量等功能子模块。
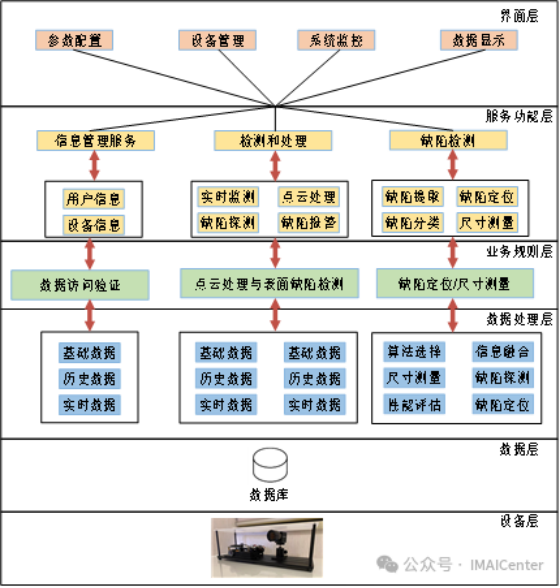
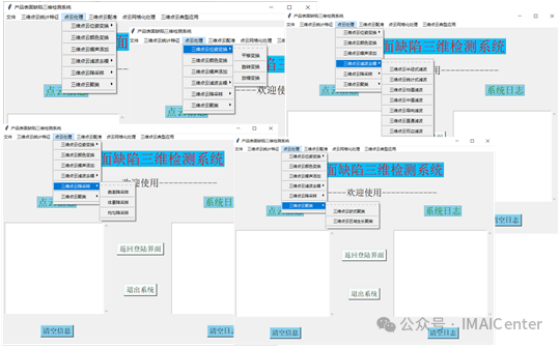
软件系统结构
3DPCAgent围绕产品表面三维缺陷检测的需求,以点云处理算法工具箱为基础开发缺陷检测软件系统,能够根据不同的测量要求和测量环境调用不同的算法实现不同工作环境下不同产品缺陷的精确检测。以Python为编程语言基于Tkinter 框架设计并开发基于机器视觉与3D点云的产品缺陷检测系统。3DPCAgent 以实现产品表面三维缺陷的探测、识别、定位为目标,系统功能主要包含以下功能模块:
(1)点云统计特征获取功能。三维点云相较于二维图像是高维数据,包含着颜色以及三维空间坐标信息。稠密的点能够准确描述产品表面的几何结构,点云统计特征获取模块通过调用算法对点云进行统计分析,获取点云数目、密度、体积等关键信息数据便于后续的分析和参数设置。
(2)点云处理功能。通过深度学习或者主动式三维测量设备所获取的三维点云包含众多的数据点,并且数据点之间是无序的,包含着较多噪声。为了方便后续对点云的分析处理以及缺陷检测,需要对点云数据进行处理,包括点云三维位姿变换、点云颜色变化、点云滤波去噪、点云降采样等功能。
(3)三维点云配准功能。点云配准是点云处理的关键步骤之一。点云配准指的是输入两幅点云:源点云和目标点云,输出一个变换使得源点云和目标点云的重合程度尽可能高。其本质就是对两个不同视角下的坐标系,比如世界坐标系和相机坐标系,需要求出一个变换使得两个坐标系变换到统一视角下。这里的变换包括刚性变换和非刚性变换即包括旋转、平移、放缩。点云配准同样广泛应用于产品表面的缺陷检测之中,通过将测量产品和标准产品点云进行配准从而识别出产品表面的三维缺陷。
(4)点云网格化功能。点云网格化是点云的高级处理方法之一,将三维点云松散的结构用三角面来表示可以用来模拟复杂物体的表面,便于曲面等复杂表面的表面积计算。
(5)三维点云典型应用。基于点云数据以及点云处理算法的产品表面检测典型应用,主要包括产品表面缺陷检测,三维测量等。
(6)数据管理模块。搭建数据仓库,对检测产品类型、缺陷信息、点云数据、测量设备等信息进行记录,实现数据的有效管理方便后续分析。