系统介绍
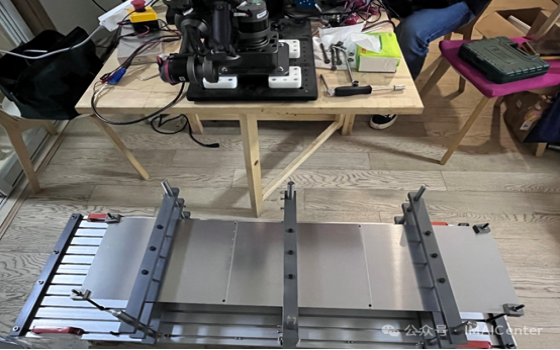
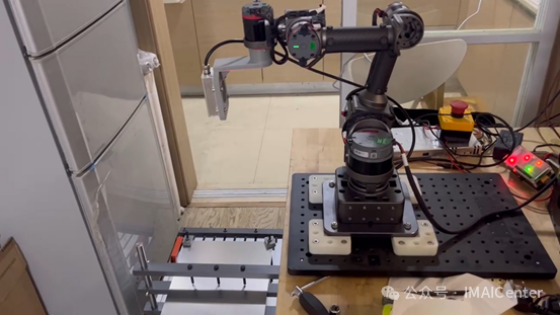
机械臂辅助激光测距系统RLMDAgent使用机械臂搭载激光测距仪,利用机械臂灵活的工作空间以及稳定精准的运动规划,充分发挥出激光测距仪的测距功能。系统分为四个模块:机械臂配置、线激光传感器设置、线激光测距流程设置以及线激光测距。 系统采用Python编程语言,满足不同平台需求(包括Windows、Linux)。采用全Python语言,以B/S模式,通过前端与后端集成开发,采用开放的、模块化、多层架构的设计思想进行了研制。
案例分析
第一章 主要功能
1.1 机械臂配置
1.2 线激光传感器设置
1.3 线激光测距流程设置
1.4 线激光测距
第二章 功能流程
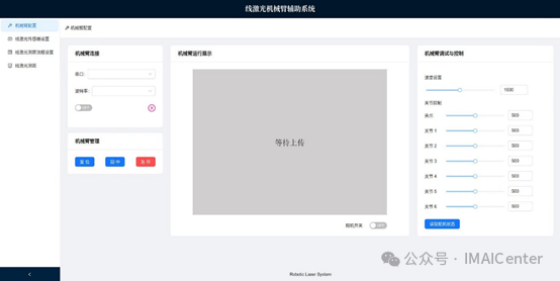
2.1 机械臂配置
首先,选择机械臂的串口和波特率,连接机械臂;接着打开中间的相机按钮,通过前端观察到机械臂的运行状况,然后便可以通过右侧的滑块来控制机械臂的运行,以此来调试机械臂。
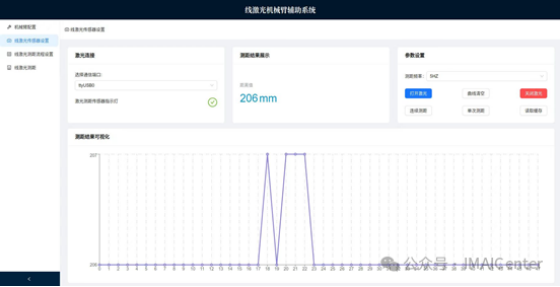
2.2 线激光传感器设置
首先,在激光连接区域,选择激光测距仪的端口,连接成功以后,指示灯会变绿;接着,便可以在参数设置区域设置激光测距仪的测距频率,控制激光测距仪进行单次测距或者是连续测距,测距结果会被显示在测距结果显示区域以及以折线图的形式展现在下方的可视化区域。
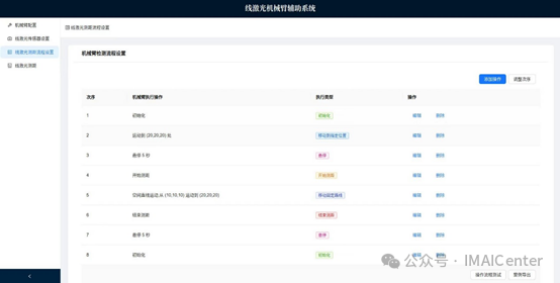
2.3 线激光测距流程设置
利用机械臂辅助线激光测距主要依赖于机械臂的空间直线运动带来的便利,在测距过程中,机械臂的操作可以划分为主要的四个类别:初始化:初始化机械臂到方便运动的位姿;悬停:机械臂完成操作后,保证安全的停顿;移动到指定地点:机械臂运行到需要测距的位置;移动固定路线:控制机械臂进行直线运动。根据固定的操作,设置好运行顺序后,将操作保存。
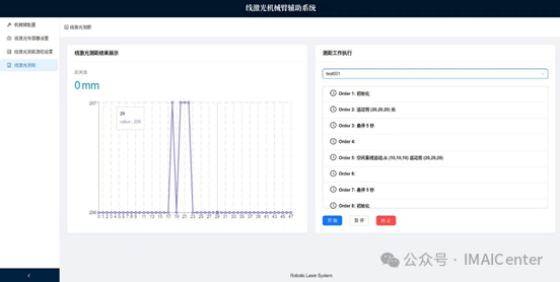
2.4 线激光测距
根据保存的操作流程,点击开始按钮便可以执行测距操作,为防止意外发生,还要暂停和终止按钮用来中断机械臂的运行。
实际场景